Section 9.1 Initial Value Problems
\begin{equation*}
x'(t) = f(t,x(t)),\;\;t\in\Bbb R,\;x(t)\in\Bbb R^m,
\end{equation*}
together with a condition
\begin{equation*}
x(t_0)=x_0
\end{equation*}
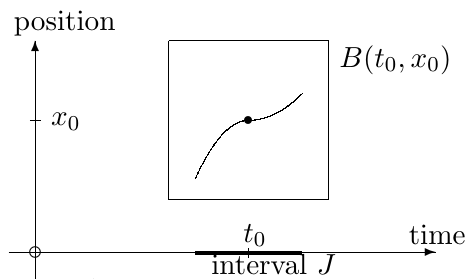
specifying the position of the desired solution at a given time. Nobody wants to waste computational time looking for solutions that do not exist. This is why the following theorem is of particular importance for us: Theorem 9.1.1 (Picard, Lindelof, Cauchy, Lipschitz). Existence and uniqueness of smooth solutions.
Consider the Initial-Value Ordinary Differential Equation
\begin{equation*}
\dot x = f(t,x)\,,x(t_0)=x_0\,,\;\;t\in\Bbb R,\;x\in\Bbb R^m.
\end{equation*}
If \(f\) is smooth for all \(x\in\Bbb R^m\) and \(t\in\Bbb R\text{,}\) the ODE system above has a unique solution defined at all times \(t\) close enough to \(t_0\text{.}\)
\begin{equation*}
\dot x=x, x(t_0)=x_0
\end{equation*}
has a unique solution for all \((t_0,x_0)\text{.}\) The corresponding solution
\begin{equation*}
x(t)=x_0e^{t-t_0}
\end{equation*}
in fact is actually defined for all \(t\text{.}\)
Example 2. The rhs \(f(t,x)=x^2\) like in Example 1, is smooth for all \(t\) and \(x\text{.}\) Hence, the ODE
\begin{equation*}
\dot x=x^2, x(t_0)=x_0
\end{equation*}
has a unique solution for all \((t_0,x_0)\text{.}\) The corresponding solution
\begin{equation*}
x(t)=\frac{x_0}{1-x_0(t-t_0)},
\end{equation*}
though, blows up at \(t=t_0+1/x_0\text{.}\) Namely, as the theorem goes, the solution is defined only "for \(t\) close enough to \(t_0\)".
Example 3 The rhs \(f(t,x)=\sqrt{x}\) is smooth everywhere (in its domain) except at \(x=0\text{,}\) where \(f_x(t,x)=\frac{1}{2\sqrt{x}}\) blows up. Hence uniqueness is not granted there (for existence, continuity is enough). Indeed, in this case, there are infinitely many solutions to
\begin{equation*}
\dot x=\sqrt{x},\,x(0)=0.
\end{equation*}
For instance,
\begin{equation*}
x_1(t)=t^2/4
\end{equation*}
and
\begin{equation*}
x_2(t)=0.
\end{equation*}