Section 9.10 Shooting Method
Assuming that there is a solution to
\begin{equation*}
\ddot x=f(t,x,\dot x)\,,\;x(t_0)=x_0\,,\;x(t_f)=x_f\,,
\end{equation*}
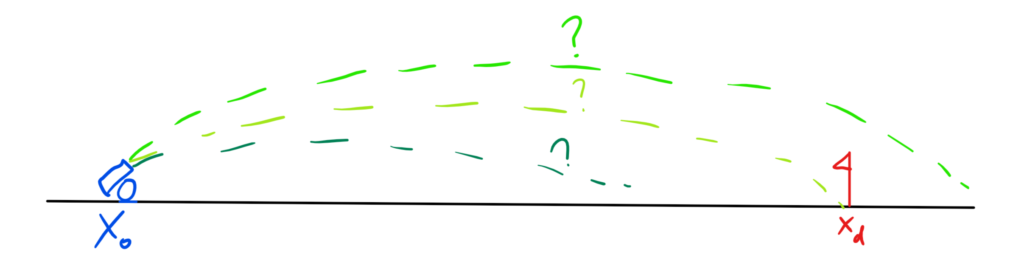
the shooting method's idea is using IVP to find better and better approximations of the value of \(\dot x(t_0)\) that produces a solution \(x(t)\) s.t. \(x(t_f)=x_f\text{.}\)
Subsection 9.10.1 The Linear Case
A particularly simple case it the linear one. Recall the following theorem:Theorem 9.10.1.
The space of solutions of a linear ODE
\begin{equation*}
\dot x = Ax,\,x(t_0)=x_0,\,x\in\Bbb R^n
\end{equation*}
is itself a linear space. Moreover, the map that sends an initial condition \(x_0\) to the corresponding solution is a linear map.
\begin{equation*}
x_0\mapsto x(t) = e^{A(t-t_0)}x_0.
\end{equation*}
In particular, this means that for linear BVP
\begin{equation*}
\ddot x = a(t) \dot x + b(t) x +c(t),\,x(t_0) = x_0,\, x(t_f)=x_f,
\end{equation*}
the function \(F(v)\) is itself linear, namely
\begin{equation*}
F(v) = \alpha v+\beta.
\end{equation*}
Hence it is enough to solve numerically two IVP in order to solve the BVP. For instance, say that \(F(0) = q_0\) and \(F(1) = q_1\text{.}\) Then \(\beta = q_0\) and \(\alpha = q_1-q_0\text{,}\) so that the solution to
\begin{equation*}
F(v) = x_f
\;\;\mbox{ is }\;\;
v = \frac{x_f-q_0}{q_1-q_0}.
\end{equation*}
Example. Consider the IVP
\begin{equation*}
\dot x = -x\cos t,\,x(0)=1,\,
\end{equation*}
whose solution is \(x(t)=e^{-\sin t}\text{.}\) Since we need a 2nd order ODE, we will rather consider the BVP given by its "first prolongation"
\begin{equation*}
\ddot x = -\dot x\cos t+x\sin t,\,x(0)=1,\,x(15\pi/2)=e.
\end{equation*}
The code below applies the method illustrade above to solve this BVP.